





Spot Micro Quadruped — Jetson Nano (ROS Melodic)
 B
B✓ Links verified May 27, 2026
Guides and BOM only — orobot firmware does not yet support this hardware.
Sign up to ExploreAbout this program
Spot Micro Quadruped — Jetson Nano / ROS Melodic Port
Jetson-Nano-specific port of the SpotMicro design family. See also: SpotMicro (Pi) and SpotMicro ESP32 entries on orobot for other compute targets.
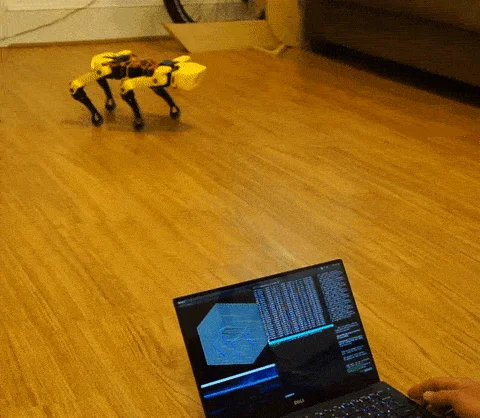
A 12-servo, 4-legged 3D-printed open-source quadruped running ROS Melodic on an NVIDIA Jetson Nano. This fork (0x49b/spotMicro-ROS-Melodic-Jetson-Nano) ports the original mike4192/spotmicro Raspberry Pi 3B + ROS Kinetic stack onto the Jetson Nano with ROS Melodic, unlocking the GPU for on-board SLAM, perception, and future learned-policy work.
The robot supports sit, stand, body angle, and walk control via two configurable gaits (8-phase stable gait by default; faster trot gait optional). Body-mounted RPLidar A1 enables real-time SLAM and 2D mapping. State is published over tf2 with open-loop calculated odometry.
Printing
This is a 12-DOF quadruped with four legs, but the STL list holds only one left-leg set and one right-leg set. To build the whole robot you must print the leg parts in the quantities below (the body parts are single).
Body — print x1 each:
mainbody,frontpart,backpart(3-piece shell)foot(base plate)
Left legs — print x2 each (2 left legs):
lshoulder,larm,larm_cover,lfoot
Right legs — print x2 each (2 right legs):
rshoulder,rarm,rarm_cover,rfoot
That is 4 complete legs (one STS/MG-class servo per joint, 3 per leg = 12 DOF). Left and right parts are true mirrors, not interchangeable. Optional repo extras (lidar mount, chassis reinforcements) and the status LCD are not part of this print set.
Hardware
- Compute: NVIDIA Jetson Nano (this port). Original target was Raspberry Pi 3B.
- Frame: Thingiverse Spot Micro (KDY0523) — thing:3445283
- Servos: 12× PDI-HV5523MG (or cls6336hv — print files compatible)
- Servo control: PCA9685, i2c
- Power: 2S 4000 mAh LiPo direct to servo board; HKU5 5V/5A UBEC for Jetson + peripherals
- Sensing: RPLidar A1 (body-mounted)
- Optional: 16×2 i2c LCD panel for state readout
Software stack
- OS: Ubuntu 18.04 (for ROS Melodic on Jetson Nano). Original used Ubuntu 16.04 + ROS Kinetic.
- Framework: ROS Melodic catkin workspace
- Languages: C++ (motion control, kinematics) + Python (keyboard command, plot)
- Key packages:
spot_micro_motion_cmd,spot_micro_keyboard_command,spot_micro_rviz(URDF),ros-i2cpwmboard,spot_micro_joy,lcd_monitor
Build flow
- Flash Jetson Nano with Ubuntu 18.04 + ROS Melodic. Add a 1 GB SWAP partition (catkin will OOM without it).
- Create a catkin workspace, clone this repo into
src/, rungit submodule update --init --recursive. sudo apt-get install ros-melodic-joy ros-melodic-rplidar-ros ros-melodic-hector-slam libi2c-dev.catkin config --cmake-args -DCMAKE_BUILD_TYPE=Release && catkin build.- Calibrate all 12 servos using the spreadsheet +
servo_move_keyboardworkflow before powering the legs. roslaunch spot_micro_motion_cmd motion_cmd.launchon the Jetson;roslaunch spot_micro_keyboard_command keyboard_command.launchfrom a remote machine.
Family cross-reference
This is one of three SpotMicro variants on orobot — pick the compute target that matches your build:
- SpotMicro (Raspberry Pi) — original
mike4192/spotmicro, Pi 3B + ROS Kinetic. - SpotMicro ESP32 —
michaelkubina/spotmicroesp32, microcontroller-only port without ROS. - SpotMicro Jetson Nano (this entry) — Jetson Nano + ROS Melodic, GPU-accelerated SLAM.
Source
- Repo: https://github.com/0x49b/spotMicro-ROS-Melodic-Jetson-Nano
- Commit: 8c027c8a357dceace856d586022954205bc247ed
- License: MIT
- Upstream:
mike4192/spotmicro(this is a Jetson Nano fork)
🖨 Print Files (13)
mainbody.stl
backpart.stl
frontpart.stl
foot.stl
larm.stl
larm_cover.stl
Required Hardware
Spot Micro Parts
| Item | Qty | Notes | Source |
|---|---|---|---|
| NVIDIA Jetson Nano (4 GB) | 1 | This port's compute target; getting scarce — Orin Nano also works with JetPack tweaks | Amazon |
| PDI-HV5523MG servo (or CLS6336HV) | 12 | 3 per leg × 4 legs | AliExpress |
| PCA9685 16-channel PWM driver | 1 | I2C servo controller | Amazon |
| 2S 4000 mAh LiPo battery | 1 | Direct to servo board | Amazon |
| HKU5 5 V/5 A UBEC | 1 | 5 V for Jetson + LCD + PCA9685 | Amazon |
| RPLidar A1 | 1 | Body-mounted for SLAM | Amazon |
| 16×2 I2C LCD panel | 1 | Optional state display | Amazon |
| Spot Micro 3D-printed frame (KDY0523) | 1 set | Print from Thingiverse | Thingiverse |
| Custom mounts (lidar, reinforcements) | 1 set | STLs in repo /assets | — |
| M2/M3 hardware + 25T servo horns | 1 kit | See Thingiverse assembly notes | Amazon |