




Stringman
About this program
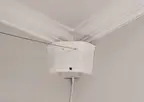
Stringman is an open-source room-scale cable-suspended crane robot by Neufangled Robotics. Multiple anchor units mount on walls or ceiling and each reel a cable under computer control to suspend and precisely position a gripper anywhere in 3D space — like a miniature industrial cable robot for your home.
The system uses computer vision (apriltags + calibrated cameras on each anchor) and a Kalman-filter position estimator to achieve millimeter-level positioning without encoders on the gantry itself. An optional ML model (PyTorch, runs on NPU or GPU) enables autonomous object detection and pick-and-place sequences.
Key specs:
- Architecture: parallel cable robot (4 anchors + 1 gripper unit)
- Anchors: MKS42C stepper motors or DM-H6215 BLDC, Raspberry Pi Zero 2W per anchor
- Gripper: servo-actuated (InventorHATMini), BNO085 IMU, VL53L1X laser rangefinder
- Host controller: PC/laptop — min 8 cores, 8 GB RAM, PyTorch acceleration required
- Control protocol: WebSocket + Protobuf over mDNS-discovered LAN connections
- Firmware: Python (nf_robot package), Apache 2.0
- Hardware designs: CERN-OHL-W 2.0
Cost: $210–$1000 depending on configuration — gripper-only kit starts at ~$210; full 4-anchor + gripper assembled system runs ~$1000. See the store for current kit tiers.
Attribution: Built by Nathan Fong / Neufangled Robotics.
License: Hardware: CERN-OHL-W 2.0 (weakly reciprocal — modifications to hardware must be released); Firmware: Apache 2.0.
Source: https://github.com/nhnifong/cranebot3-firmware
Hardware CAD: https://neufangled.com/docs/downloads/
Docs & build guides: https://neufangled.com/docs
Store: https://neufangled.com/store
🖨 Print Files (35)
eyelet-retainer.stl
Anchor---frame.stl
Anchor---Spool-A-Regular.stl
Anchor---Spool-A-Power.stl
Anchor---Spool-B.stl
Anchor---cover-top.stl
Required Hardware
| Item | Qty | Notes |
|---|---|---|
| 10mm OD 50cm L ABS tube | 1 | Link |
| 10x15x4 bearing | 2 | Link |
| 12 pins of straight 2.54 header | 1 | |
| 14x14x6 heatsink | 3 | Link |
| 2 line 5A slip ring 22mm src-22-0205a | 1 | Link |
| 24V 5A power supply | 2 | Link |
| 2m DC extension cable | 2 | Link |
| 2p JST sh cable 15cm tails for pressure sense | 1 | |
| 3/8 * 7/8 stainless steel washer 1mm thickness | 3 | Link |
| 30x30x7mm fan with 15cm JST PH plug | 3 | Link |
| 32 GB microsd card | 3 | Link |
| 40 pin double row socket | 2 | Link |
| 4p stemma to 2.54 pitch cable 10cm | 1 | |
| 4x13x5 bearing 624ZZ (PGN Bearings) | 3 | Link |
| 50lb braided fishing line (meters) super 8 slick v2 | 21 | Link |
| Alconite Rings Size 20 | 2 | Link |
| Box 20x14x6 | 1 | Link |
| Custom Gripper Hat with IMU (JLPCB) | 1 |