
Poppy Humanoid
 B
B✓ Links verified Jun 10, 2026
Sign up to InstallAbout this program
891 stars on GitHub.
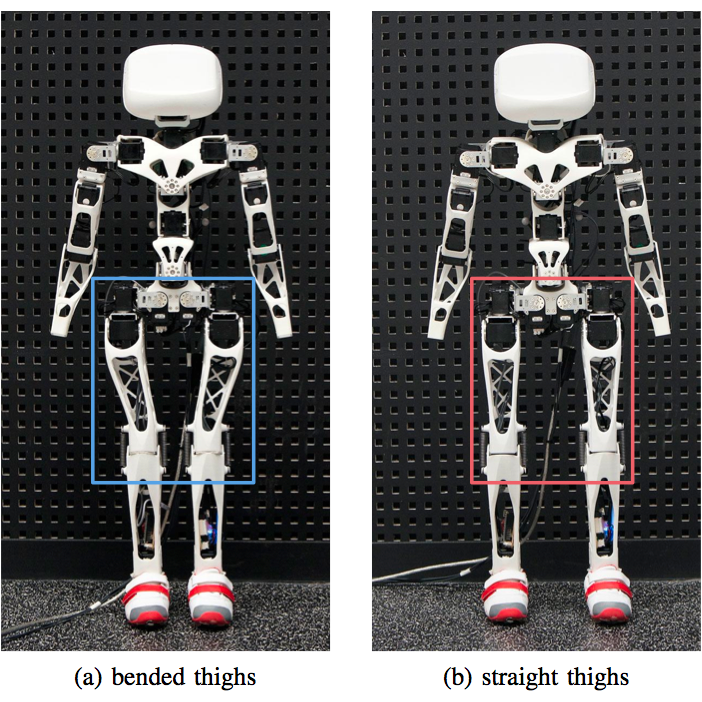
Poppy Humanoid is an open-source, 3D-printed, 25-DOF humanoid robot from the Poppy Project, originally developed at Inria's Flowers team for research in embodied cognition, human-robot interaction, and robot learning. Standing 84 cm tall and weighing about 3.5 kg, Poppy is designed with biomechanically motivated bent-thigh proportions.
Source: https://github.com/poppy-project/poppy-humanoid
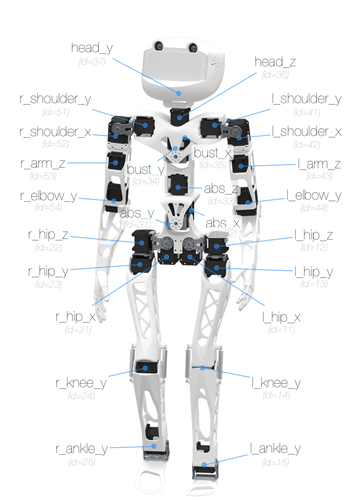
The robot uses 25× Dynamixel smart servos on a daisy-chained TTL bus. A Raspberry Pi onboard provides high-level control via pypot (the Python Dynamixel library developed for this project), with real-time joint targets streamed from user code. Compliant mode lets you back-drive the robot by hand to teach poses and trajectories — a powerful pedagogical and research primitive. Poppy Humanoid has been used in dozens of published studies on bipedal walking, imitation learning, developmental robotics, and tutor-assisted programming education.
Poppy is a modular family: the Torso variant is a desk-mountable upper body, and the Ergo Jr is a 6-DOF desk arm. Both share the Dynamixel bus stack and the pypot API. This means behaviors developed for one Poppy robot often port directly to another with configuration-level changes rather than code rewrites.
Hardware interface: USB-to-Dynamixel adapter (U2D2 or USB2AX) connected to the Raspberry Pi. No Arduino required.
This program exposes cloud-side endpoints for rest/sit postures, arm waving, compliant-mode toggle, dance primitive playback, and full demonstration record/replay. The Raspberry Pi onboard bridges the orobot cloud to the Dynamixel bus via pypot.
Credit to the Poppy Project community and Inria Flowers team (poppy-project.org) — upstream repository at https://github.com/poppy-project/poppy-humanoid. Hardware under Creative Commons Attribution-ShareAlike 4.0 (hardware/LICENSE.md), software under GPLv3 (software/LICENSE). Share-alike requires derivative hardware designs to be published under the same CC-BY-SA-4.0 license.
Build Guide
Official assembly guide: docs.poppy-project.org
Printing
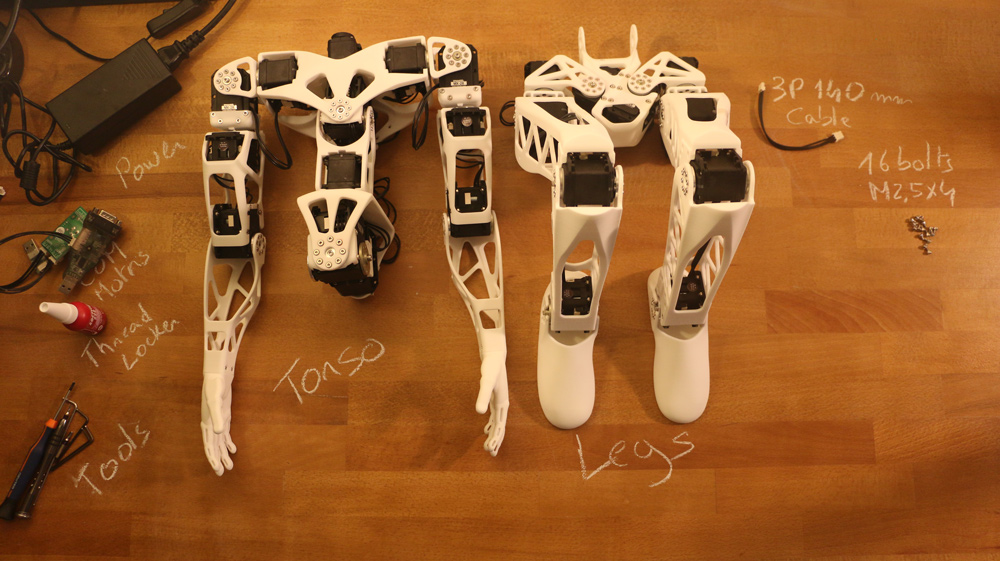
This file set contains the structural body meshes for the Poppy Humanoid (head, chest, abdomen, bust/abs/hip motor brackets, and the limb segments: shoulder, forearm, hip, thigh, shin, foot). Poppy is a left/right symmetric biped, so the limb parts are mirror pairs — each l_* part has a matching r_* part, and both must be printed (they are not alternates).
Important note on completeness: the current list is the curated set of printable body meshes, but it is not yet the full humanoid. Several right-side mirror parts (r_shoulder, r_hip, r_hip_motor, r_thigh, r_foot, r_shoulder_motor) are not present in this list and must be printed as mirrors of their left-side counterparts. The complete, official, print-ready STL package for the full ~25-DOF Poppy Humanoid is distributed by the upstream project as the "STL_3D_printed_parts.zip" asset attached to the poppy-project/poppy-humanoid GitHub releases; builders should use that archive for the definitive, complete part list and quantities.
Note on file naming: these are the "_visual" geometry meshes from Poppy's URDF model. The companion "_respondable" meshes that appear in the source repository are simplified collision hulls used only for physics simulation and should NOT be printed — they have been excluded from this Print All set.
🖨 Print Files (14)
head_visual.STL
chest_visual.STL
abdomen_visual.STL
bust_motors_visual.STL
l_shoulder_visual.STL
l_forearm_visual.STL
Required Hardware
Actuators (Dynamixel)
| Item | Qty | Notes | Source |
|---|---|---|---|
| Dynamixel MX-28AT servo | 19 | Legs, torso, arms (~$333 ea — this is a research-grade build) | Robotis |
| Dynamixel MX-64AT servo | 4 | Spine (abs) and hips | Robotis |
| Dynamixel AX-12A servo | 2 | Head pan/tilt | Robotis |
| U2D2 USB-serial Dynamixel adapter | 1 | Serial bus interface (replaces USB2Dynamixel) | Robotis |
Compute & Power
| Item | Qty | Notes | Source |
|---|---|---|---|
| Raspberry Pi 4 (or 3) | 1 | Main controller | Amazon |
| 12 V power supply (10 A+ recommended) | 1 | Servo power rail | Amazon |
Structure
| Item | Qty | Notes | Source |
|---|