



PAROL6 Desktop Robot Arm
 B
BAbout this program
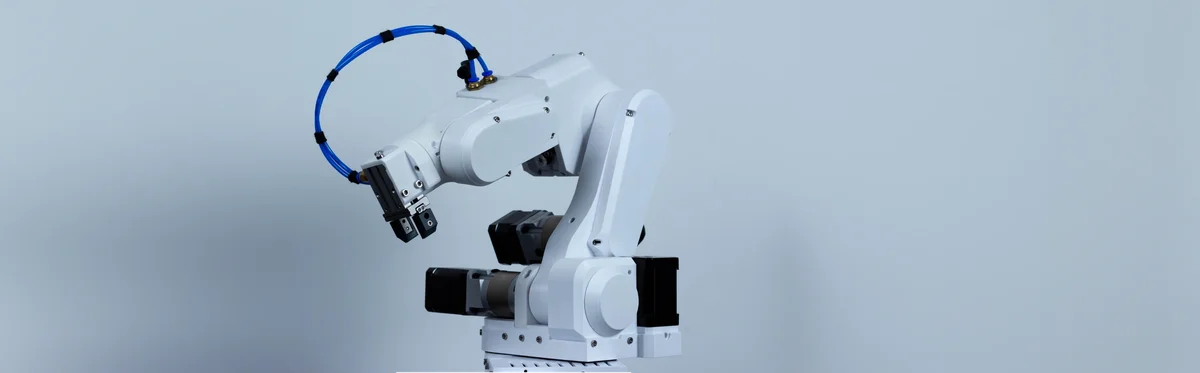
PAROL6 Desktop Robot Arm
A high-performance 6-DOF desktop robotic arm designed to mirror industrial robots in mechanical design, control software, and usability — but small enough to sit on your desk.
Designed by Petar Crnjak (Source Robotics). Released under GPLv3. STL files, control software, and GUI are all open-source.
What you can do
- Run kinematic demos from your browser
- Practice pick-and-place with the included gripper attachments
- Learn industrial-style arm control (home, jog, teach points)
- Extend with your own gripper tooling (pneumatic, vacuum, 2-finger)
Specs
| Degrees of Freedom | 6 + gripper |
| Joints | J1 base, J2 shoulder, J3 elbow, J4/J5 forearm, J6 wrist |
| Payload | ~500g (typical) |
| Reach | ~400mm |
| Controller | Custom PAROL6 control board (STM32-based, PlatformIO) |
| Motors | NEMA 17 stepper motors on joints |
| License | GPLv3 (software + STLs) |
Build options
Two paths:
- Buy a kit from Source Robotics — fully supported, pre-sourced parts
- Source & print yourself — follow the BOM and Building instructions
STL files
This program includes a representative subset of 12 STLs covering BASE, SHOULDER, ELBOW, FOREARM, GRIPPER, and ESTOP groups. For the full 41-part canonical set (plus mounting plates and extras), see the STL directory on GitHub.
Resources
- 📖 Official Docs
- 🎥 YouTube demo
- 🐍 Python API
- 🎛 Commander software
- 🤖 ROS2 / MoveIt simulation
- 💬 Discord community
⚠️ Safety
PAROL6 involves lethal voltages and moving mechanical parts. Read the full SAFETY WARNING AND DISCLAIMER before assembling or operating.
Attribution
Source: PCrnjak/PAROL6-Desktop-robot-arm · License: GPLv3 · © Petar Crnjak / Source Robotics
Printing
PAROL6 is a 6-DOF desktop robot arm. The Print All set covers the full mechanical build: the base/electronics enclosure, the J1 turret/shoulder assembly, the J2 upper-arm joint, the upper arm and its covers, the elbow (J3/J4), the forearm and J5 wrist drive (pulleys, belt lids), the wrist, the E-stop housing, and a gripper attachment. Print one of each part. Most belts/pulleys are printed once; follow the upstream assembly guide for orientation and supports.
Gripper options: this set includes Gripper_ARMS plus the pneumatic and vacuum gripper holders as alternate end-effectors — choose the one that matches your hardware (you don't need all three). A second "horizontal pneumatic" gripper variant exists upstream and can be substituted if preferred.
Important — one oversized part: the main "Upper_arm.STL" (~33 MB) is the single largest part and exceeds this site's file-size limit, so it could not be hosted in the Print Files list. Download it directly from the upstream repository (PCrnjak/PAROL6-Desktop-robot-arm, under STL/UPPER_ARM/Upper_arm.STL) and print it alongside the parts here. Every other structural part of the arm is included.
🖨 Print Files (38)
Electronics_case_v1_1.STL
main_base_blocker.STL
fan_cover.STL
J1_backplate.STL
J1_rotation_shaft.STL
J2_limit_switch_cover.STL
Required Hardware
| Part | Notes |
|---|---|
| Stepper motors | 6 joints; specific models in the official BOM |
| Motor drivers | Per stepper (integrated on PAROL6 control board) |
| 3D printed arm links | All structural parts printable |
| Bearings | Multiple sizes; exact list in the official BOM |
| Custom PAROL6 control board (STM32) | Main controller — see Source Robotics or the official BOM |
| 24V power supply | Powers all motors — Amazon |
| M3/M4/M5 bolts + heat inserts | Throughout frame assembly — Amazon + inserts |